Back in the 1940’s, engineers all around the world were busy crafting flying machines with guns. At Germany, they ended up with a contraption called Würger. Würger, or the Shrike, better known as the Focke Wulf Fw 190, was a plane well ahead of its time with its high performance and advanced technology. 70 years later, with only few surviving Fw 190’s remaining, some engineers in China succeeded in crafting a smaller version of the Würger out of plastic foam, which ended up in my hands from a friend of mine. (Thanks, Sami! 😉 )

The Fw 190 I have, is a semi-scale model aircraft with a wingspan of one meter. This fast and agile small plane is made of very durable foam and its performance is true to its predecessor in World War Two. To make a long story short, it was my first radio-controlled plane and I landed/crashed/crash-landed it on a tree, ending its first flight full of numerous un-controlled loops and rolls. The plane survived the crash landing with minor damages but I was annoyed because of it and grounded the thing until I found a way how I could handle it with my minimal RC-plane flying experience. And as everyone may guess, practicing first with some slow-flying high-winged (boring) trainer model was not an option.
Kommandogerät
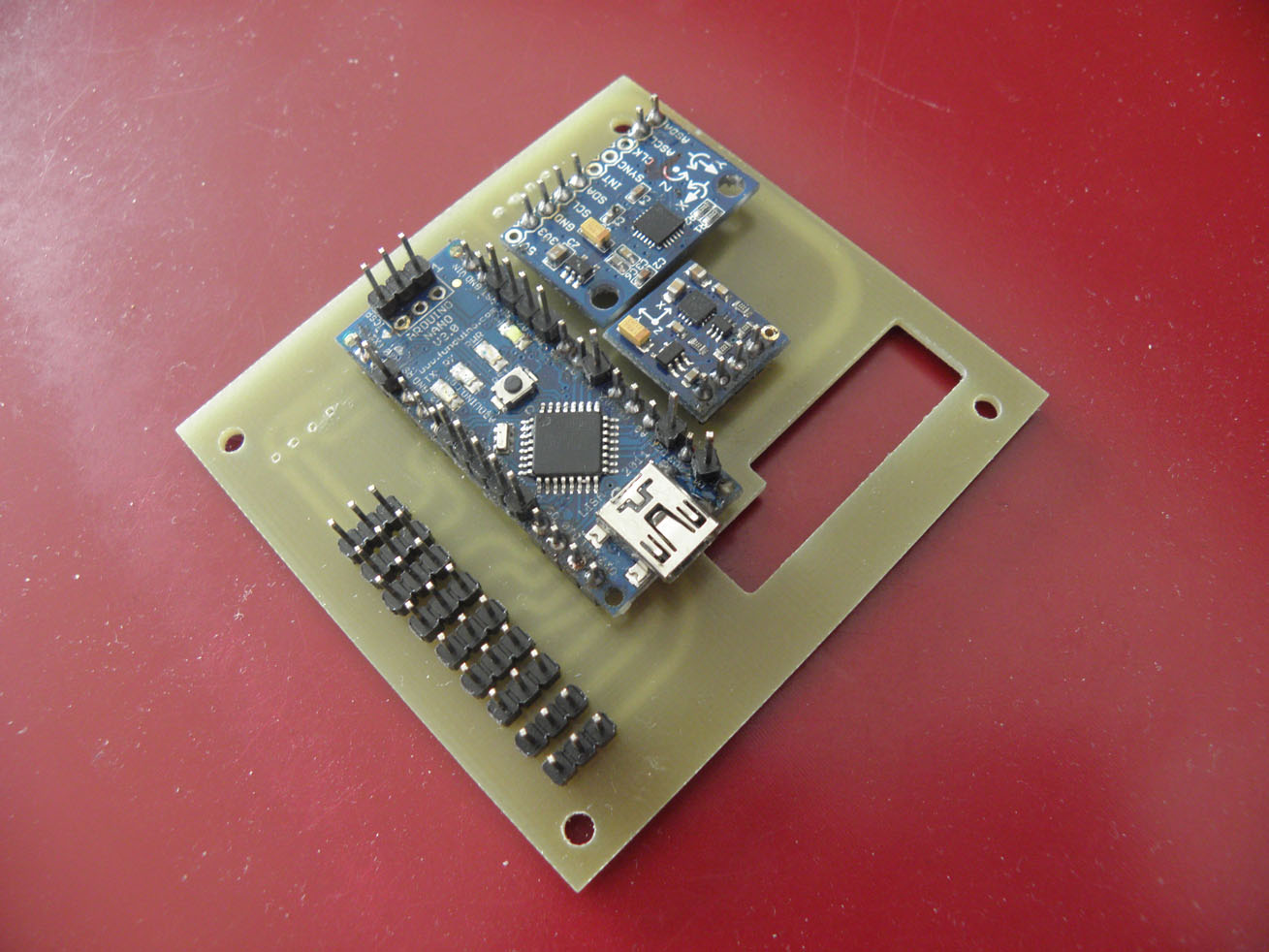
According to the Wikipedia, the real Fw 190 was equipped with a device called Kommandogerät. It was an engine management system, a Fadec of its time, which assisted the pilot in adjusting the engine. As some technological assistance was also needed to keep the smaller version of the Shrike under my control, I had to make my own version of this kind of device. As I had some (pre-crashed) parts left over from my Drone project, I started building stabilizer electronics out of them. I had one spare gyro/accelerometer, an Arduino Nano and one magnetometer left over for the project which was also a good opportunity for me to learn designing circuit boards using the Eagle software.
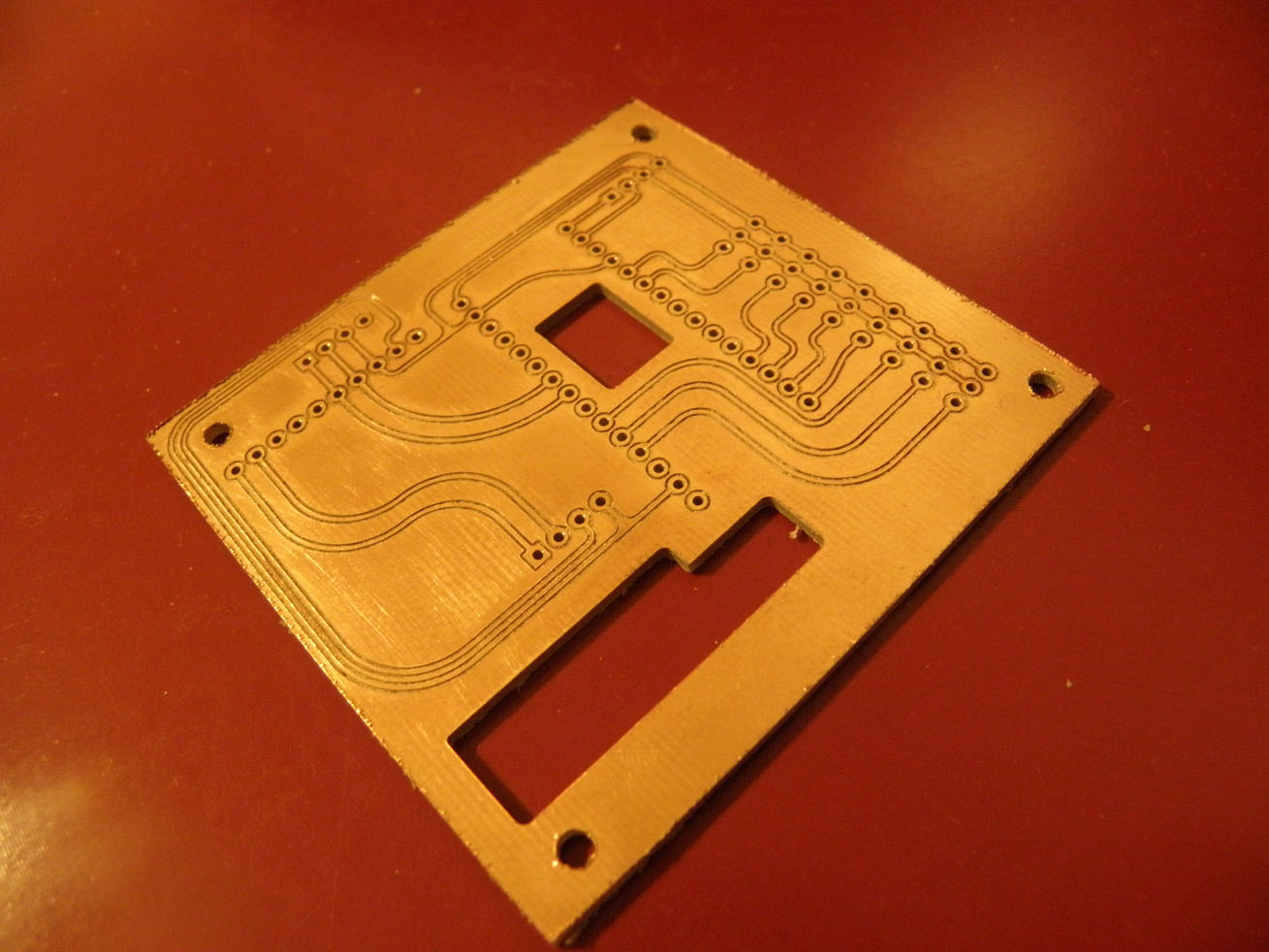
To connect the parts into each other, a simple circuit board was needed as I did not want to make a big mess of wires inside the plane. As it looks exotic in 2013, I just had to try the rounded corners on the board tracks when I saw an option for that in Eagle. Rounded tracks were common 30 years ago in cheap consumer electronics.
After the device was completed, I made a small compartment for it inside the plane and attached it in place using liberal amounts of hot-melt glue. It was better to work.
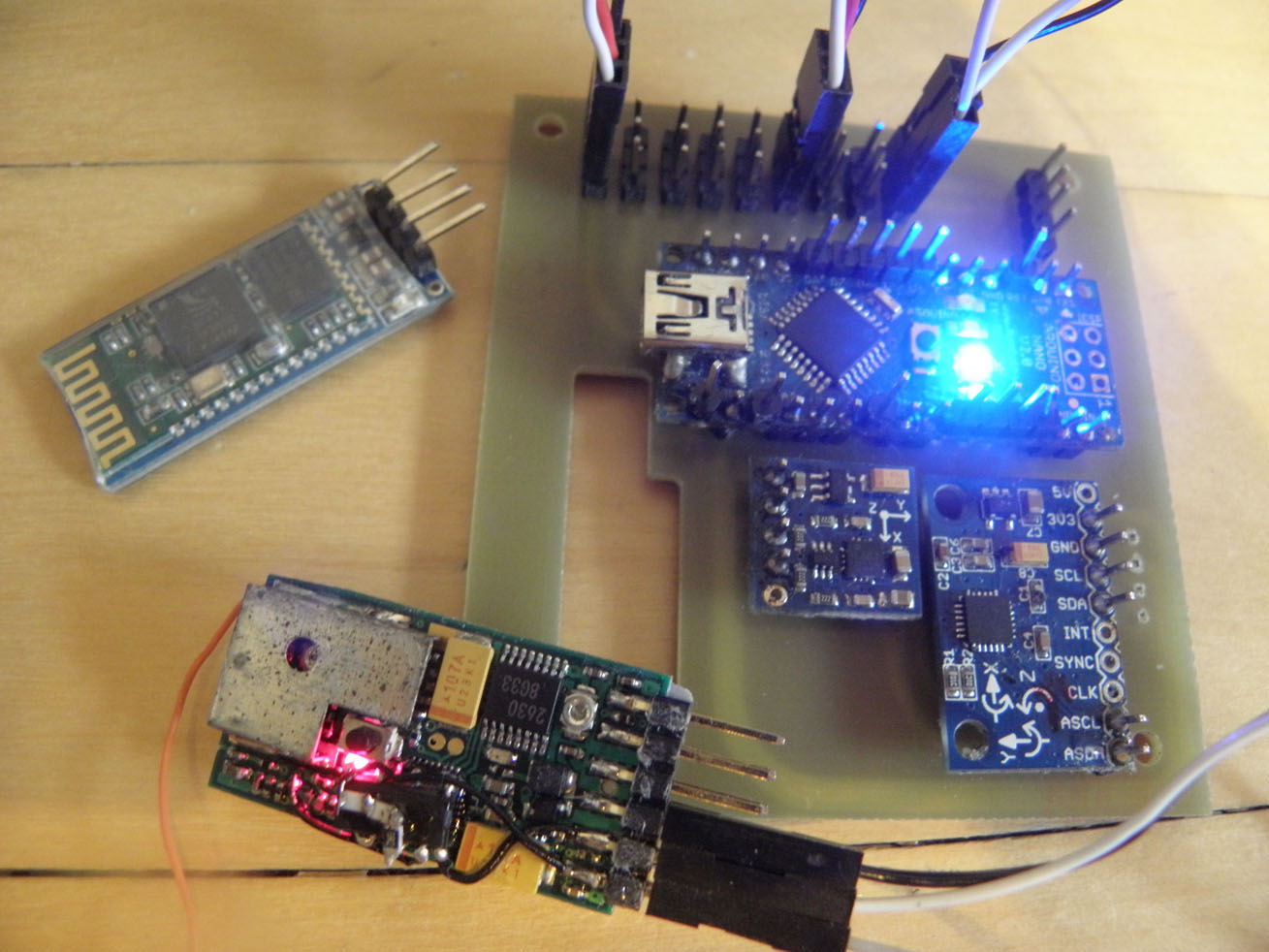
A version of the MultiWii software that was modified to control ailerons using only a single servo, was uploaded to the board. The board is powered using a small switch-mode power supply. A four-channel RC receiver, made by some Chinese company was modified to output PPM sum signal for the MultiWii. After the modification, the receiver outputs raw data for six channels instead of four.
Analog RC receivers output pulse-width modulated (PWM) signal that is de-multiplexed from the PPM sum signal that was received from the transmitter. These PWM signals are used to drive RC servos. Digital flight controllers do not necessarily need this, as they can extract the channel information from the PPM signal using their software. The advantage of the PPM signal is that only one wire is needed for installation, instead of a big mess of wires.
Das testflight

After everything installed and checked to work, it was time to go outside and try to fly the thing. The first visit to my flying field was a slight disappointment. At first I tried to supply the MultiWii using a linear regulator or “BEC” of the motor controller. When the battery was connected, the MultiWii tried to position all the servos simultaneously. It made them draw a lot of current from the BEC circuit which caused the processor of the stabilizer to reboot due to brown-out. After a restart, it tried to energize all the servos again. For some reason the stabilizer worked at home, but not any more.

The second attempt on the next day, with a small switch-mode power supply powering the stabilizer, went better. I had one of the transmitters switches assigned as an activation switch for the stabilization, so that I could select direct manual control of the control surfaces if there was a problem with the stabilizer tuning. My plan was to launch the plane in direct control mode and when it had gained some altitude, switch the stabilization on.
From the first flight that ended up to a tree, I recalled that the propeller torque with full throttle needed a lot of rudder to compensate. With this in my mind, I threw the Fw 190 to air with full power and to my surprise, needed no rudder correction. It flew like it was on rails, being very easy to control. My only problem was a stabilizer activation switch seemed to do nothing. Sami, who I got the plane from, told me to use some exponential settings of the transmitter with the plane to make it less responsive and easier to fly. I thought that the plane had become from hyper-active to a very docile because of the expos. After flying few batteries, I took the plane home to see why the stabilizer did not seem to activate. But when I handled the plane, it moved its control surfaces automatically every time it got moved. I don’t know why I did not notice it while preparing the plane for flight at the field. The MultiWii was flying the plane from the beginning, which made it so easy to fly. To be honest, I did not expect the device to work at all, at least not this good at the first attempt.
Das Afterflight

After having the plane for one year now, I am still enjoying it. It is especially nice to see it fly since the circuit board I made for the stabilizer, is the first board I have ever made, if the one that I drew by hand at school 15 years ago does not count. Thanks to the MultiWii schtabilizer, I have not crashed the plane at all, after nearly 100 flights flown with it. It is not picky about weather conditions either; the plane can be flown in very windy conditions with ease. All the corrections, including rudder, are fully automatic. The Focke flies coordinated turns automatically. The stabilizer centers the turns automatically when its gyro senses side slip or propeller torque induced yaw. Not a bad plane for a beginner! 😉